|
Videos Taig Mill Duet3 Control |
Duet3 /
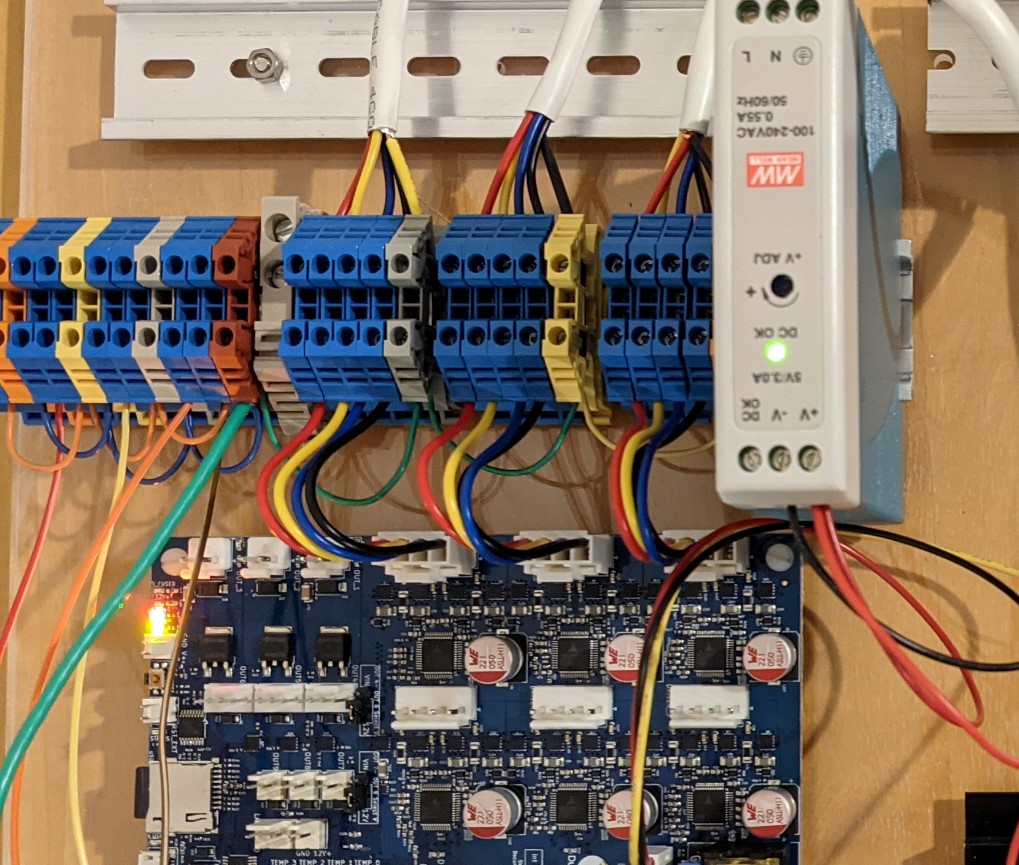
MotorsConfiguring the MotorsMotors are usually connected to the 4-wire outputs labeled Drive0...Drive5. This shows three motors (X,Y,Z) connected to the ports. Configuring motors on the Duet3 is done by adding script lines to the config.g system file. Because they are G and M code you can type the commands into the Duet3 G-Code console to test motor configuration and then write them into config.g for permanent running at startup. Here's a first attempt at script lines for the X motor only. It is a 3A Nema23 motor connected to the drive 0 cable. None of the parameters are tuned but the axis runs fine. ; motor definition M569 P0.0 S0 ; physical drive 0.0 goes forwards M584 X0.0 ; set drive mapping X to 0, Y to 1 and Z to 2 M350 X16 I1 ; configure microstepping with interpolation M92 X1280.00 ; set steps per mm M203 X1400 ; set maximum speeds (mm/min) M566 X500 ; set maximum instantaneous speed changes (mm/min) M201 X100 ; set accelerations (mm/s^2) ; use about 80% of power rating for heat M906 X2400 I30 ; set motor currents (mA) and motor idle factor in per cent |